Retour page d'accueil
Retour sommaire électronique
|
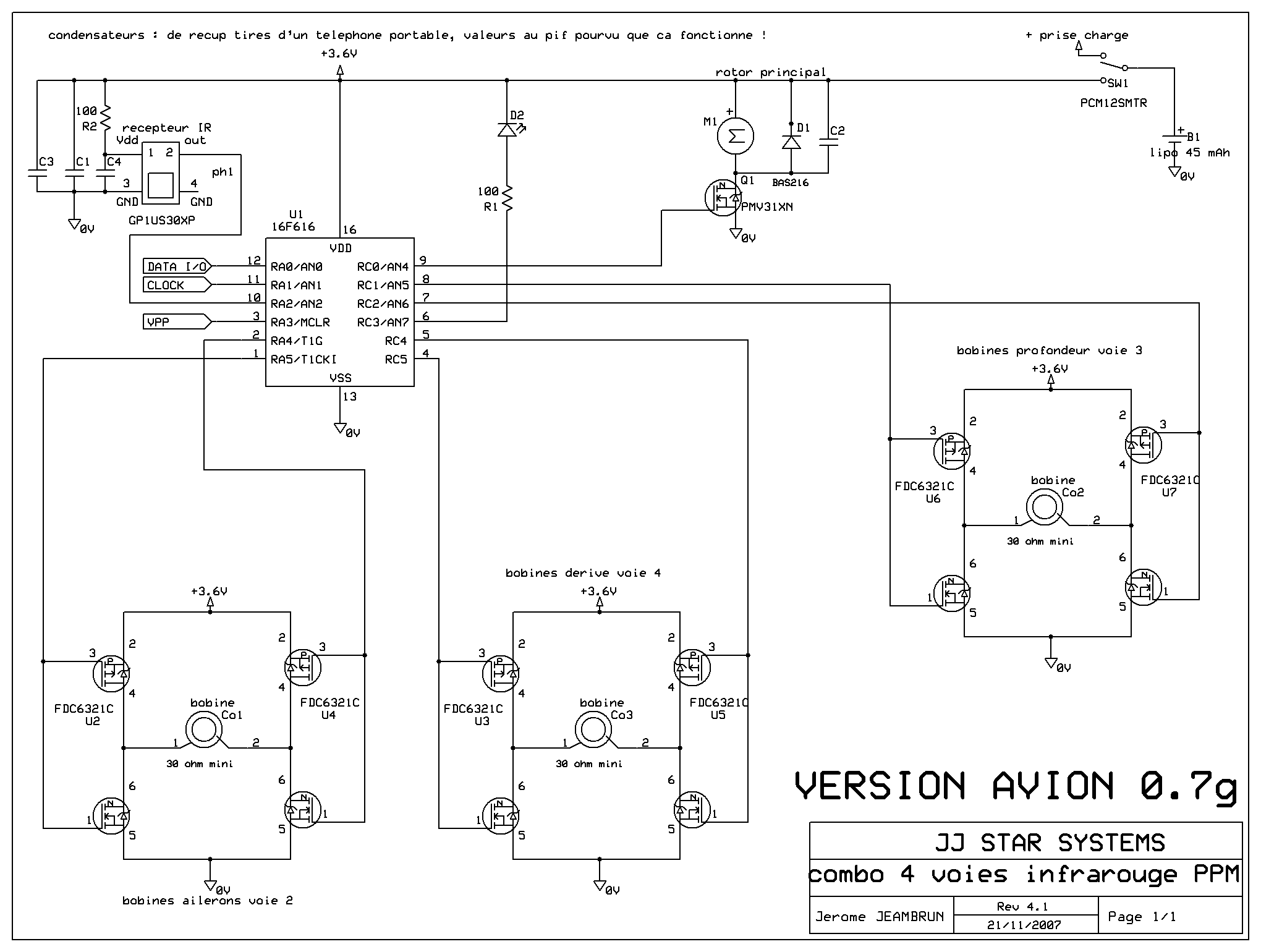
combo infrarouge 4 voies avion
|
|
|
- récepteur compatible PPM via le
convertisseur infrarouge
- alimentation par 1 élément Lipo uniquement
- pas de convertisseur DC/DC
- 1 sortie PWM pour moteur DC ferrite 3A maxi
- 3 sorties PWM 0.4A maxi pour actuateurs avec inversion du sens du
courant.
(bobines 60Ω mini, 100 à 150Ω conseillé)
- soft pour radio 8 voies
- générateur PWM à 2kHz
- contrôle d'erreurs, digital signal processing, visualisation des
erreurs, hold 1s, fail safe, la totale.
- géré par microcontrôleur 8bits PIC 16F616
- résolution 16 pas sur la course du manche.
- masse estimée 0.7g nu, 1.04g avec prise et fils de programmation
- dimensions : 14 x 10.5 mm
- recommandé en indoor
- outdoor envisageable si le récepteur reste en vue de l'émetteur mais
ce n'est pas le top.
|
MISE A JOUR : le 29/02/2008 :
Mise en garde : voir la page
concernant le combo pour PicooZ.
L'esprit reste le même, ne tentez pas l'aventure en consommateur, vous seriez
très déçu.
La mise au point ne se fait pas facilement, les soudures sont délicates vu que
la taille a été divisée par 2 entre le combo hélico et celui-ci.
En incluant le développement du hard, du soft, la fabrication du mulet, j'arrive
à environ 180h en étant parti de la version hélico.
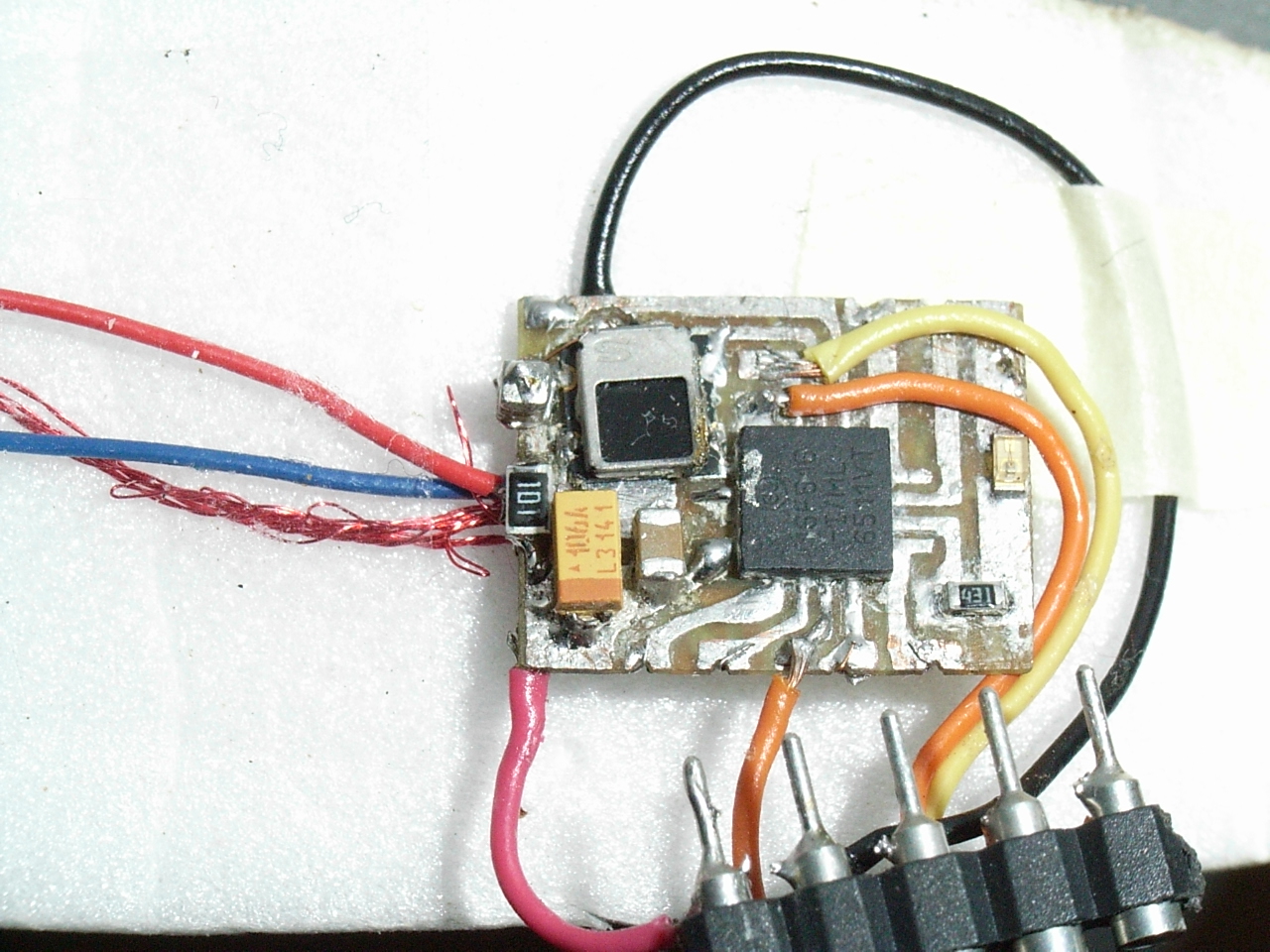
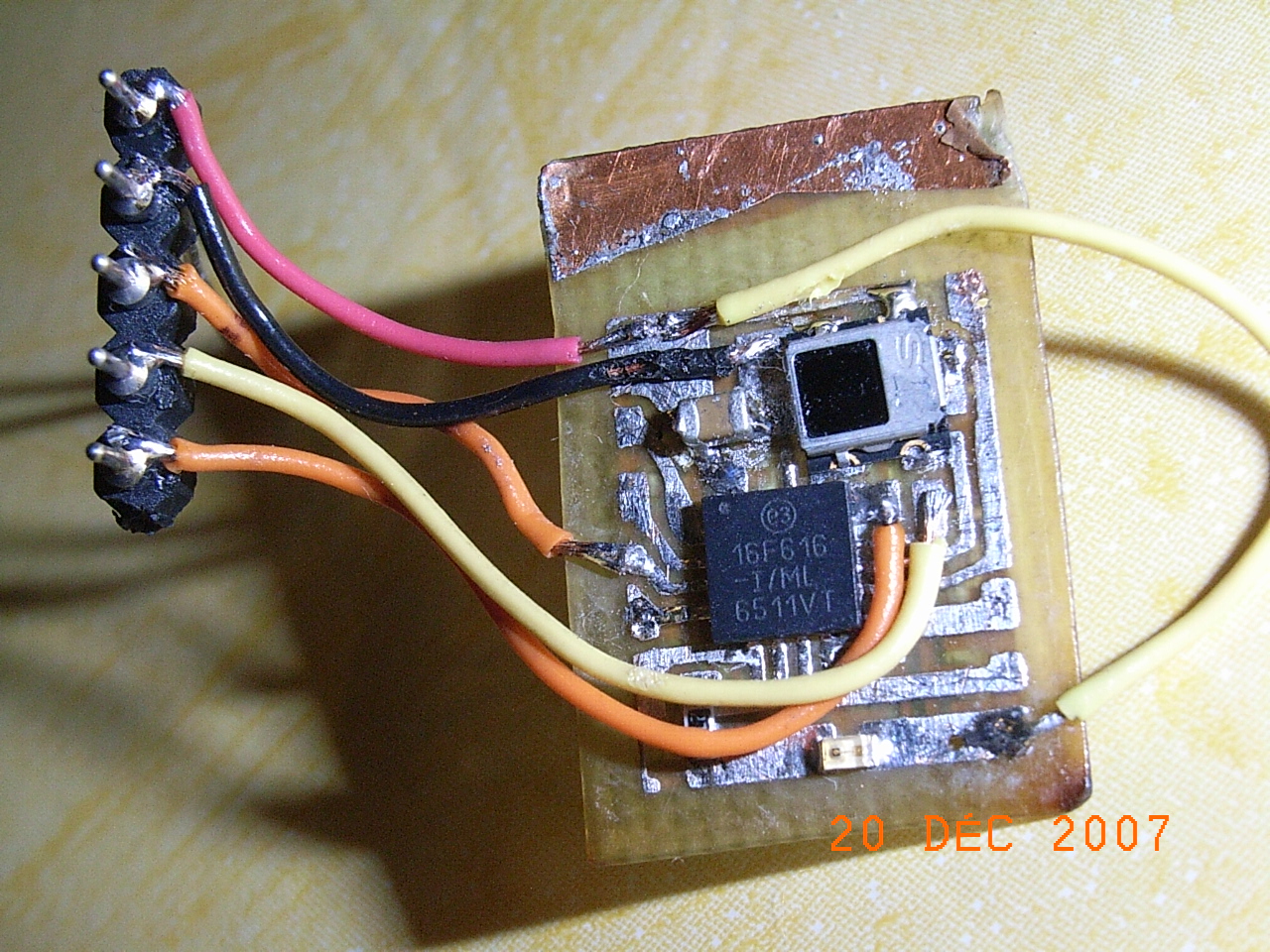
Le coeur du système est confié à un PIC16F616 format I/ML (4x4 mm) qui s'occupe de :
- recevoir le signal PPM et calculer la largeur de chaque impulsion.
- calculer les rapports cycliques des 4 variateurs et gérer les sens des 3 voies
destinées aux gouvernes..
- générer les signaux PWM pour les 4 sorties puissance.
- gérer la sécurité.
Le soft implanté dans la bête est dispo ici en version assembleur et code
source. Les logigrammes ne sont pas dispo car pas à jour.
Remarque : un 16F684 convient mais il faut changer quelques bricoles dans le
programme, certains registres ont un nom différent.
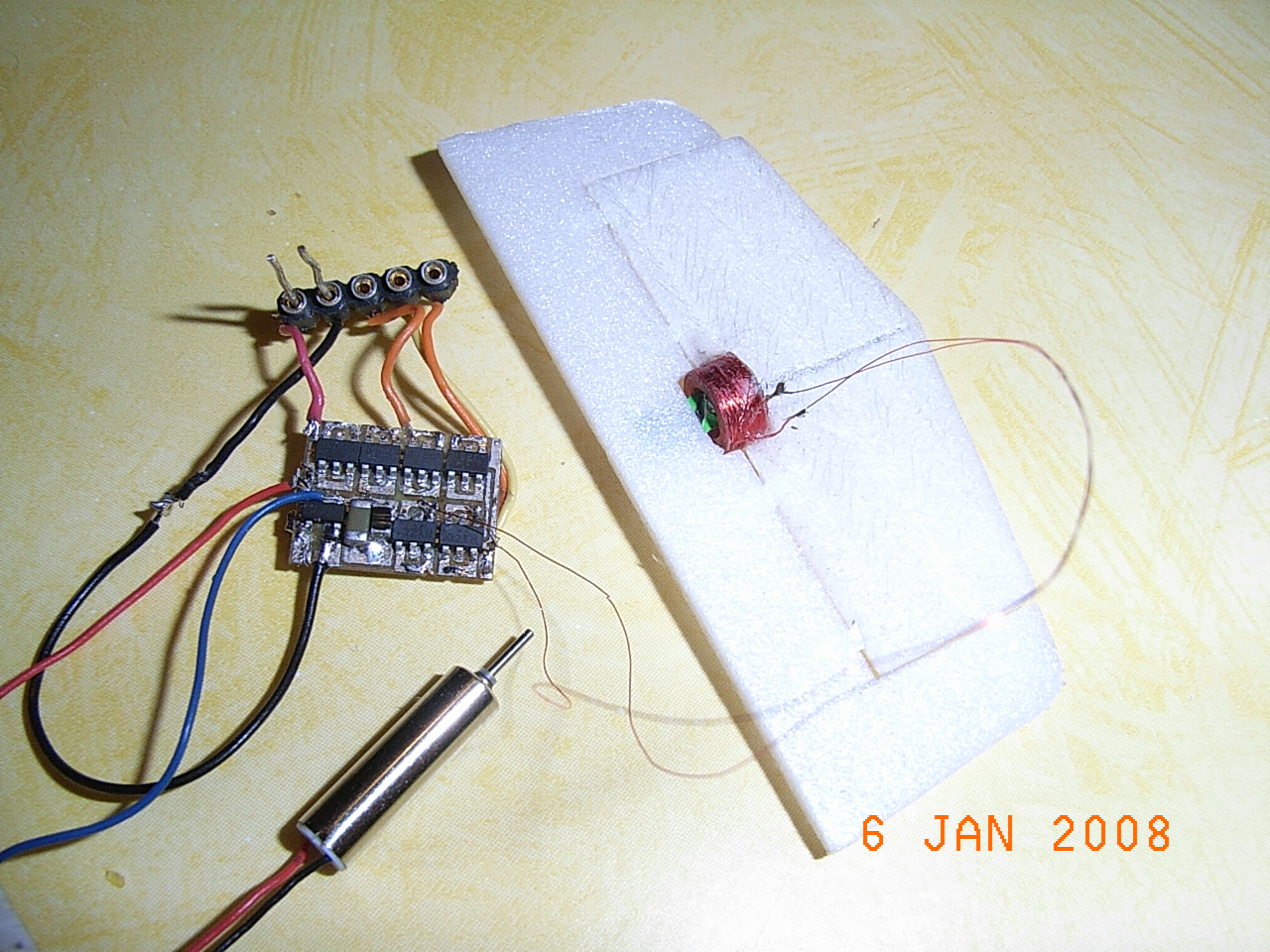
La prise de programmation au pas de 2.54 , le circuit d'origine d'un PicooZ
et le moteur Ø4 donnent l'échelle...
Il ne tremble pas tant que ça, le papa !
Dérivé de la version hélico, il a subi de fortes améliorations sur :
-
le générateur PWM. Sa performance
est maintenant indépendante du nombre de voies. On pourrait en rajouter autant
que l'on souhaite.
-
la gestion des défauts. L'ancien
plantait de temps en temps lors de la perte de signal et la coupure
automatique ne se faisait pas.
la version 4.01 n'a pas de filtre
logiciel. On entend donc chanter les bobines manches au neutre ce qui prouve que
ça fonctionne.
En mise au point on peut parfaitement augmenter la zone neutre pour économiser
des électrons et faire une moyenne glissante des largeurs d'impulsions.
Il suffit d'enlevez des points virgule dans le programme.
Attention il est prévu pour la
séquence JR en 8 voies :
-
voie 1 = gaz
-
voie 2 = ailerons
-
voie 3 = profondeur
-
voie 4 = dérive
Si vous utilisez une autre séquence, il
faudra magouiller le programme pour échanger les valeurs qui vous intéressent
via une variable locale.
Il suffit d'échanger la voie 1 avec une autre puisque les voies 2, 3 et 4 sont
identiques côté puissance.
A vous de connecter votre bobine sur la bonne.
Si vous utilisez un autre nombre de
voies et que le nombre d'impulsions est différent, il faudra modifier aussi le
soft car il les compte et une trame n'est considérée comme valide que s'il y a 8
impulsions.
Bien que ce ne soit pas sa vocation
première, ce système peut évoluer à côté d'un émetteur de PicooZ en
fonctionnement car la trame standard PPM est plus resserrée que la trame
utilisée par Silverlit. Les trames parasitées sont rejetées d'office pa
En revanche l'inverse n'est pas vrai, la réception du Picoo sera parasitée par
le convertisseur PPM-IR.
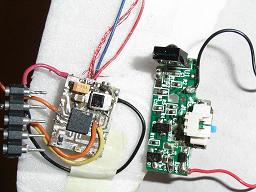
Les premiers essais avant détourage et raccordement des 2 face
:
La prise de programmation est provisoire.


Gamme de fabrication :
-
gravez et détourez immédiatement
votre circuit. Ne faites pas comme moi qui ai soudé puis découpé à la scie
vibrante après, j'ai cassé une soudure sur 5 !
-
préétamez et râclez bien la surface
pour ne garder qu'un film, n'oubliez pas que l'on chasse le mg.
-
soudez le microcontroleur et les
fils de programmation.
-
entrez le programme. Déjà là, ce
n'est pas gagné...
Pour le 16F616, j'utilise
DL4YHF's PIC
Programmer et un programmateur JDM.
-
soudez les autres composants de la
face de commande.
-
vérifiez que le comportement de la
led correspond à celui de la video. Pas d'émission : flash court. Manche au
milieu : flash long. Manche à zéro : led éteinte.
-
vérifiez à l'oscillo les 7 sorties
PWM en bougeant les manches. Ex : ailerons à droite, sortie sur XXXXXXX,
ailerons à gauche sortie sur XXXXXXXX (ou l'inverse).
-
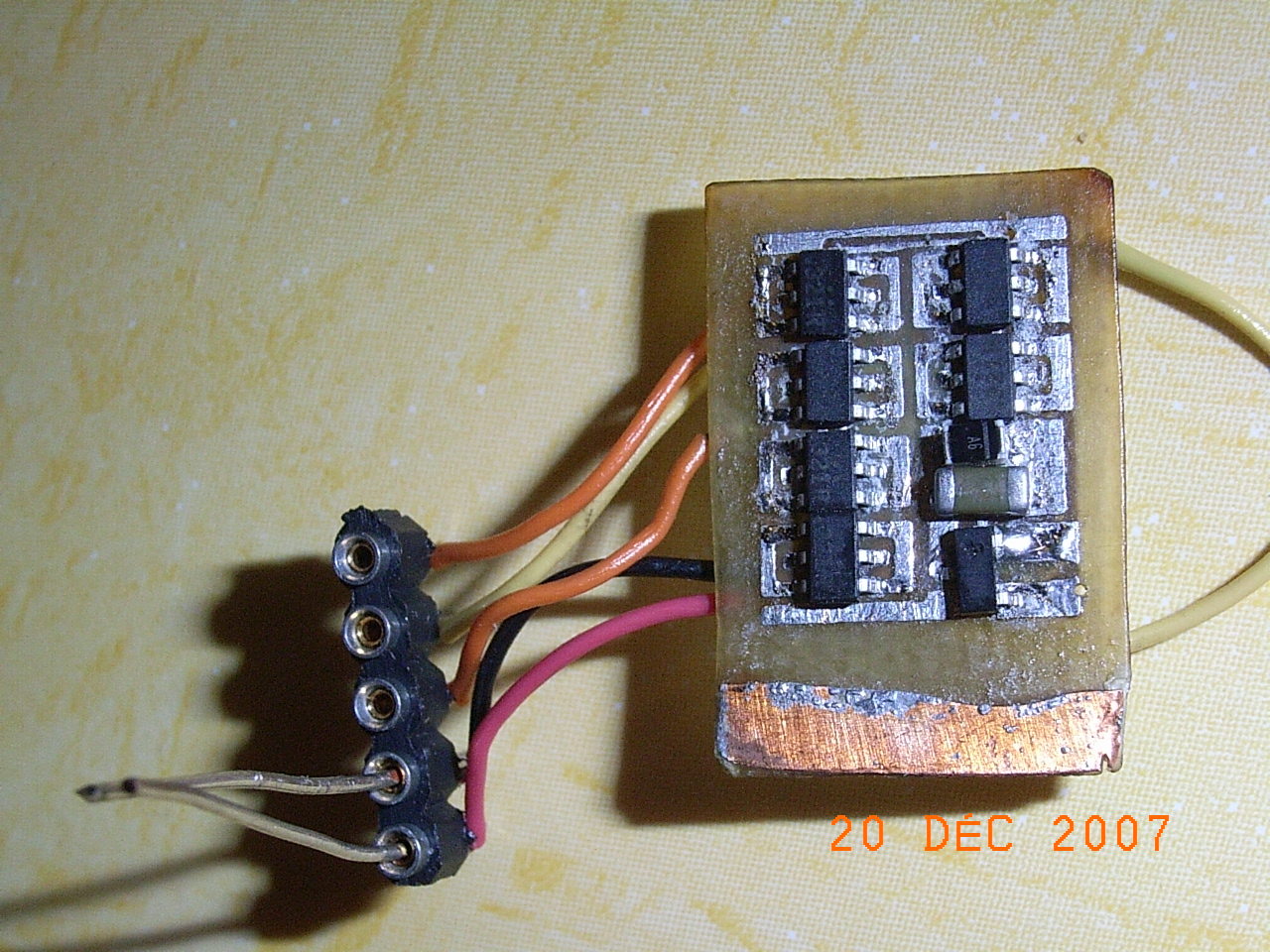
soudez les composants de la face
puissance en commençant par la diode, le condensateur, le transistor du
moteur.
-
vérifiez la fonction en pilotant la
patte du transistor avec une résistance de 10K que vous amènerez au zéro ou au
+3.6V.
-
connectez le pilotage du transistor
moteur
depuis la sortie correspondante du microcontroleur avec un brin de cuivre.
Testez.
-
répétez l'opération avec les
transistors à 6 pattes par groupe de 2 en vérifiant chaque fonction avec une
bobine. N'oubliez pas de connecter le microcontroleur à chaque commande de
puissance !
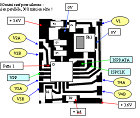
Rien que pour vous, un bô schéma de
câblage en technicolor :
Attention lors des essais et de la reprogrammation,
la face puissance ne doit pas être alimentée sans quoi les ponts en H se
trouvent dans un état indéterminé et ça fume... A éviter à tout prix. Donc, soit
vous pilotez correctement les transistors mos des ponts en H, soit vous supprimez la charge
(pas d'actuateurs connectés), soit vous désactivez toute la face de puissance,
suivant le cas.
Pour ce faire, gardez-vous un fil positif assez long entre le recto et le verso,
pourvu d'une tulipe qui pourra être connectée et
déconnectée pendant la mise au point. Quand tout fonctionnera, vous le
remplacerez par un brin court plus léger.
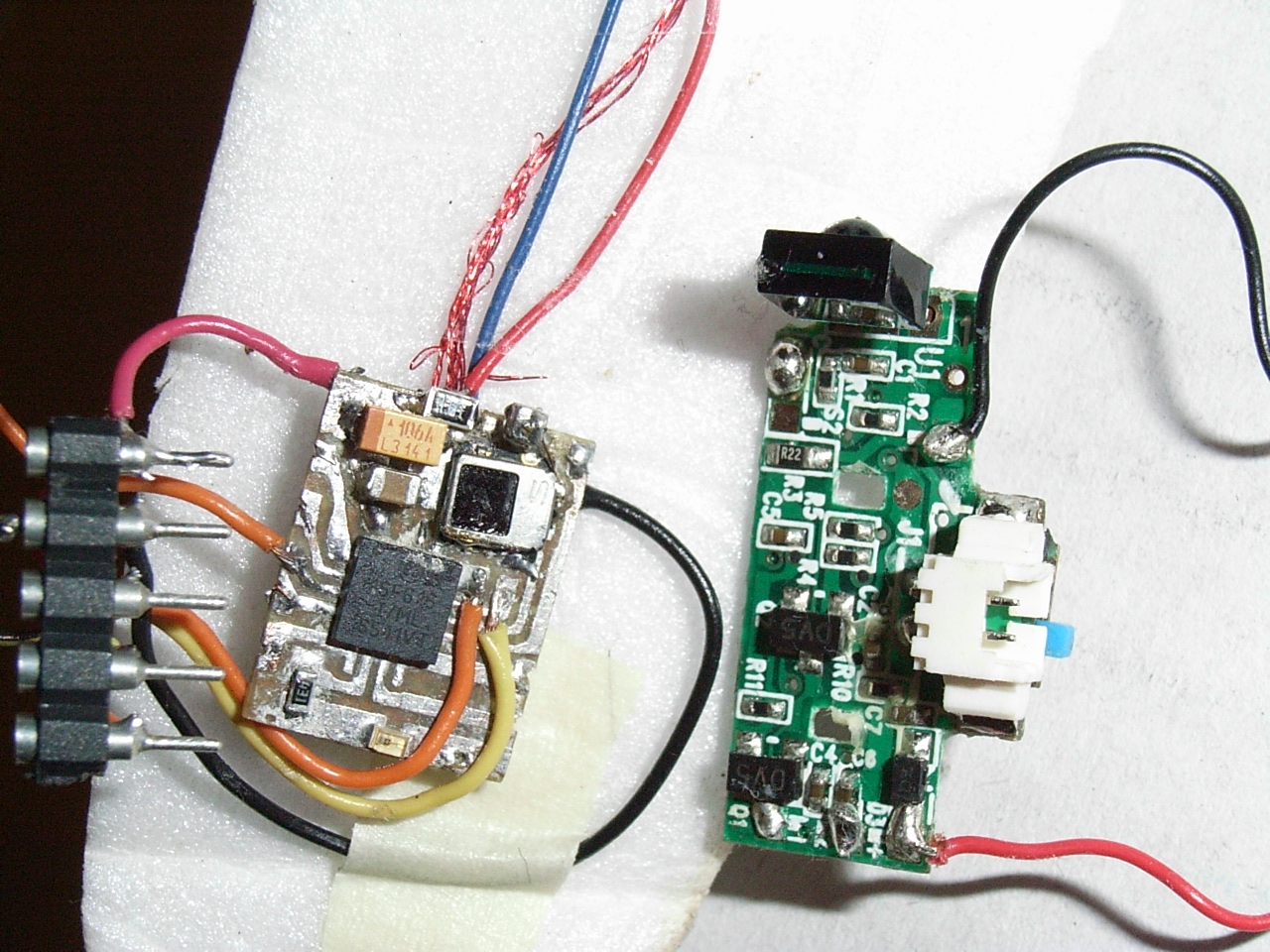
Attention le circuit de la
photo "non détouré"
ne correspond pas à celui du typon, il manque R2 et C4 qui ont été rajoutés "en
volant".
J'avais volontairement omis ce filtre pour gagner en masse, mais le récepteur IR
ramassait des parasites à la pelle.
Le schéma de câblage, lui, est OK.
Nota : Je déconseille la pâte à braser pour
un autre usage que l'étamage des pistes pour ceux qui comme moi ne maîtrisent
pas le passage au four.
J'avais soudé mes composants avec et ai eu de gros problèmes de fiabilité.
Finalement j'ai tout repris au fil (Ø0.5 maxi maxi), c'est plus lourd mais ça
tient aux chocs, et bien...
Voyez la page décrivant
le mulet.
Il y a une vidéo en vol devant de jolies poubelles.
A voir lors de vos essais, il peut
être intéressant de déporter le composant récepteur IR pour le positionner à un
endroit judicieux du modèle, soit sur le dessus soit sur le dessous du fuselage.
Les diodes émettrices seront alors
pointées judicieusement, soit vers le sol soit vers le plafond (indoor) pour
bénéficier de l'effet de réflexion.

Téléchargement :
Tout pour faire, y'a plus qu'à :
- le schéma électrique qui fait office de nomenclature. Le récepteur IR
Sharp se trouve chez Farnell. Prendre du 38 kHz de préférence.
- les typons, en tiff et sous word. Je préfère
le second qui conserve bien la taille..
- le schéma de câblage.
- le code source pour MPASM de Microchip avec tous
les accessoires pour les retouches.
Je n'ai pas ménagé mes efforts pour livrer à la connaissance de notre petit
univers le meilleur de ce que j'arrive à faire actuellement.
Toute utilisation telle quelle de mes modestes travaux à des fins commerciales
est interdite, faut pas pousser quand même...
N'hésitez pas à me faire part de vos essais, ça fait toujours plaisir !
Merci à mon copilote Mickaël qui, du haut de ses 14 ans m'a aidé
techniquement et moralement pour arriver au bout.
En développement 2008, la même chose en 2.4 GHz pour voler dehors sans
crainte des pertes de contrôle.
Le Minium Kyosho qui va servir de cobaye est sur la route...
{kind=link}