Retour page d'accueil
Retour sommaire hélico
|
Proto PICOOZ 4 voies pas fixe avec contrôle cyclique
|
|
|
objectif :
|
MISE A JOUR : le 01/05/2007
L'idée de base est simple :
Au vu de son modeste
équipement, le PicooZ d'origine offre des qualités de vol époustouflantes.
On n'a qu'une envie : le rendre pilotable avec un VRAI émetteur, des vrais
manches et une vraie commande de plateau cyclique, le tout en y passant un peu
de temps et en surmontant tous les obstacles techniques.
Bilan lors de cette mise à jour : Si l'électronique fonctionne,
aucun vol correct n'a été obtenu, mes conclusions sont détaillées en bas de
page. Il commence à faire sérieusement trop beau dehors
pour passer des heures à s'user les yeux, ça attendra l'hiver prochain ! Et à
priori ce sera plutôt pour adapter le combo à un avion.
Qu'est-ce qu'on met dedans :
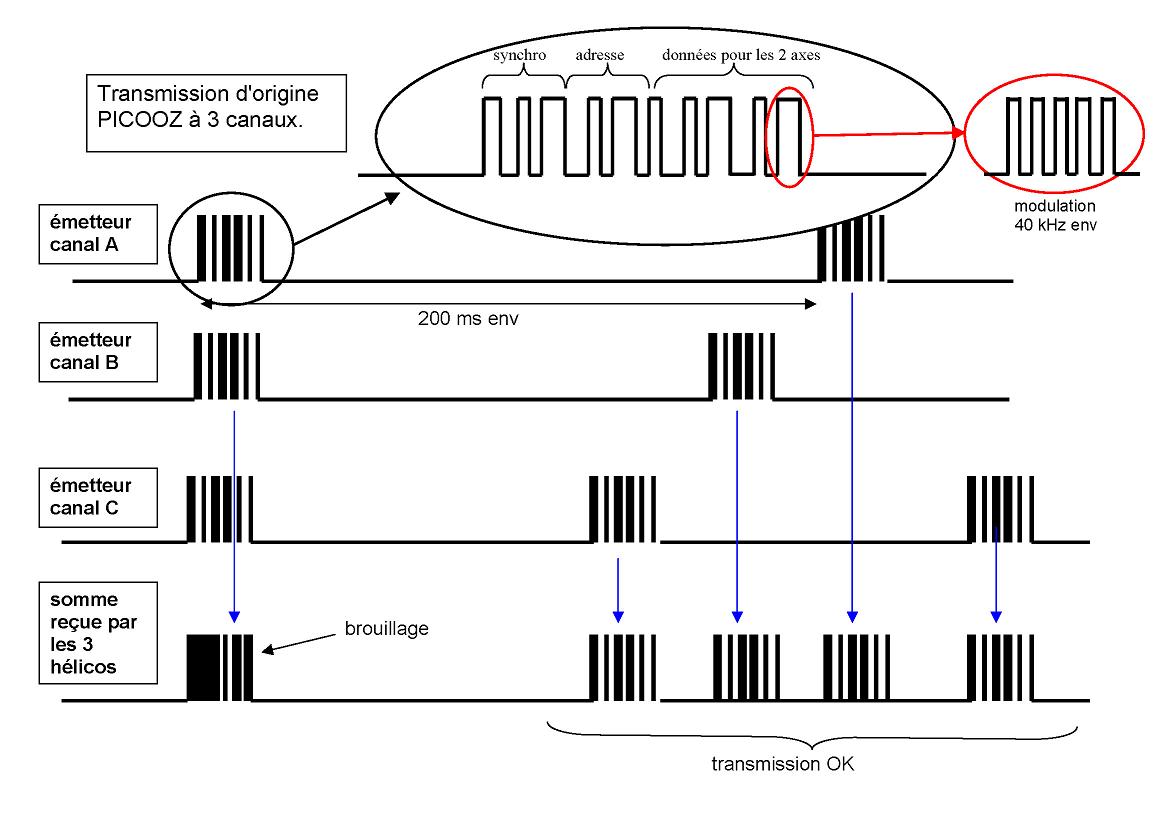
Le système d'origine fonctionne d'après ce que j'ai vu en codage numérique
F/2F.
Pour info, les trames qui permettent d'utiliser 3 modèles en même temps sont
espacées d'un temps variable, voir schéma. De cette façon, il y a toujours une
trame qui sera reçue correctement de temps en temps par son destinataire.
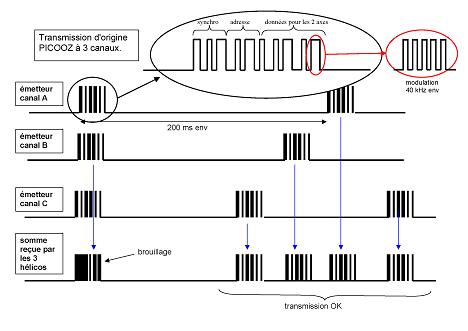
Inconvénient : le codage A (appareil rouge) voit ses ordres actualisés tous les
0.2s environ, ce n'est pas demain que l'on pourra faire de la 3D avec une
transmission de ce genre, mais ce n'est pas le sujet du jour.
Autre inconvénient : si 2 appareils fonctionnent en même temps, par principe
il existe des brouillages réguliers. Si 3 appareils fonctionnent en même temps,
c'est encore pire, les instants de brouillage sont encore plus fréquents.
Saluons toutefois la prouesse technique, 3 appareils en l'air en même temps sur
la même fréquence c'est déjà joli.
Je n'avais guère envie de passer du temps à convertir la sortie PPM de mon
émetteur (X3810 JR) en codage numérique perso bien que ce soit parfaitement possible
et encore moins envie d'utiliser le SPCM ou ZPCM d'origine, de vraies brouettes
(pour le traitement, j'entends),
alors j'ai choisi la voie de la facilité pour ce proto : je reste en PPM, mais
au lieu d'une transmission FM, j'utilise une transmission infra rouge.
L'analogique, ça se comprend.
Le module d'émission encore nommé convertisseur IR mérite bien une page à
lui, vous le retrouverez en détail dans la rubrique électronique
cliquez ici.

Ici
aussi, c'est perso.
Voir tout le détail dans la rubrique électronique
cliquez ici

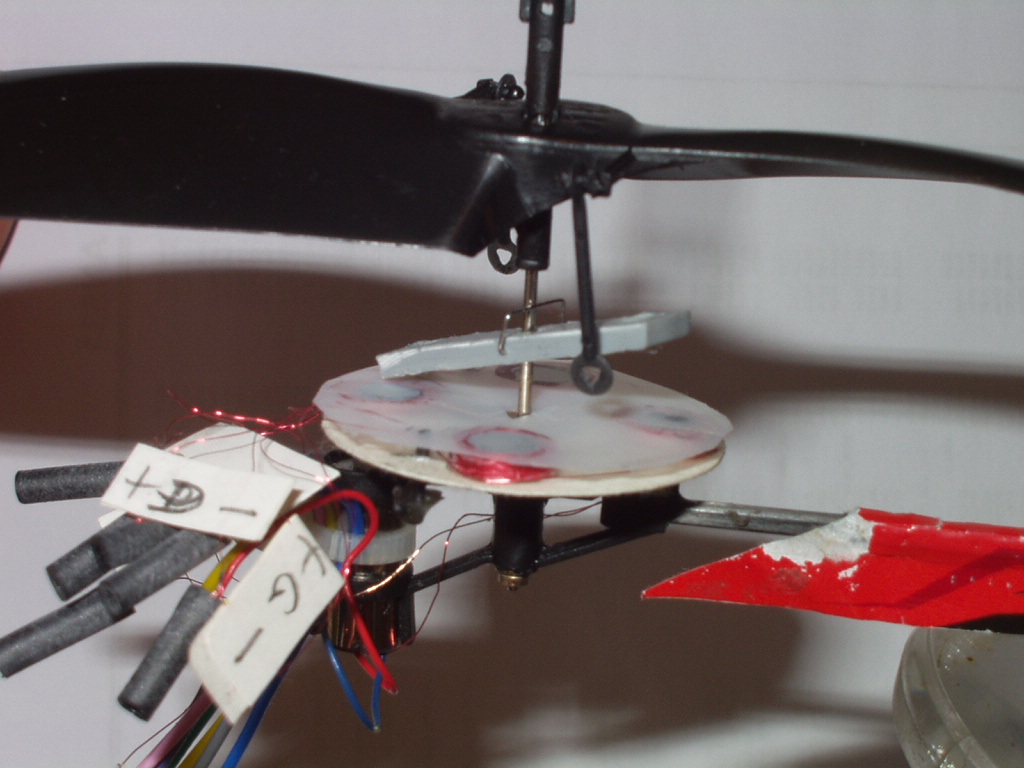
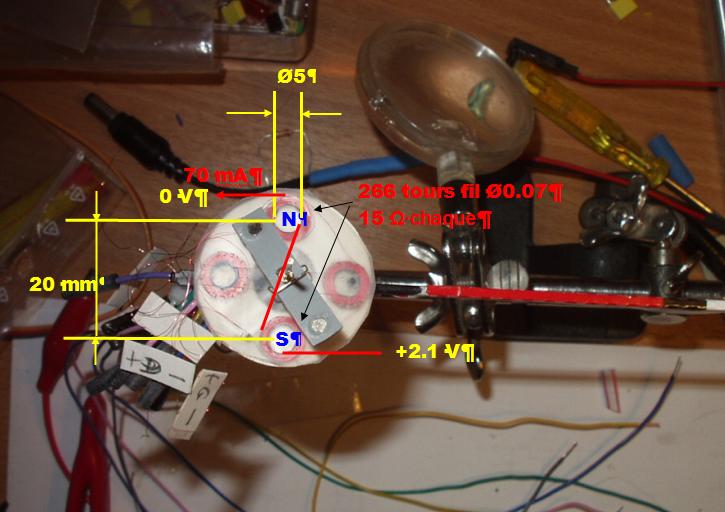
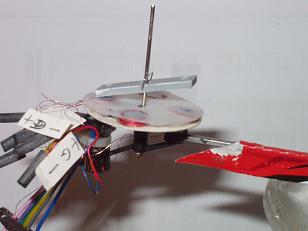
J'ai repris une idée parue dans la presse il y a un an ou deux : un levier avec
un aimant à chaque extrémité tourne sur l'axe rotor et passe au dessus de 4
bobines montées en push-pull.
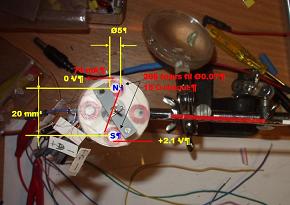
Les 4 bobines sont collées sur un plateau en fibre de verre fixé sur le chassis
mais réhaussé pour être juste au dessus de la couronne dentée.
Chaque bobine comporte 266 tours de fil émaillé de 0.07 mm de diamètre ce qui
donne une résistance de 15 Ohm par bobine.
2 bobines opposées sont en série donc la résistance vue du pont en H est de 30
Ohm par circuit, le courant qui s'établit est d'environ 60 mA avec des
transistors bipolaires.
Avec la version CMS et transistors fet, le courant est forcément plus fort mais
je n'ai pas pu le mesurer de façon fiable. En effet, quand j'incorpore mon
ampèremètre en série dans le circuit, la résistance additionnelle est loin
d'être négligeable, mais au bruit on doit être dans les 130 mA ce qui est
beaucoup pour la batterie.

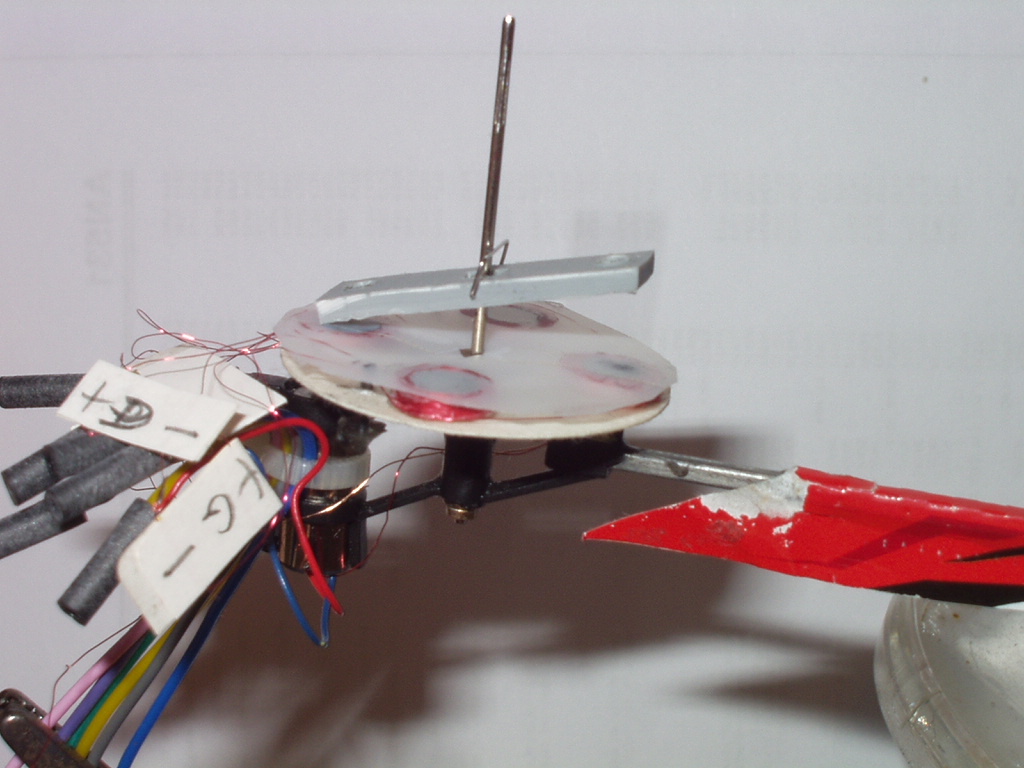
Le levier est influencé par le flux magnétique généré par les bobines,
le tout proportionnel au déplacement du manche bien entendu. Et ça bouge ? Ben
oui ! Ci dessous videos des premiers essais.
![]() Video
1 taille 3.4 Mo
Video
1 taille 3.4 Mo
![]() Video
2 taille 3.4 Mo
Video
2 taille 3.4 Mo
Le câblage est identique pour chaque paire de bobine montées en
série. Lorsque l'une attire, celle montée à 180° repousse les aimants insérés
dans le levier.
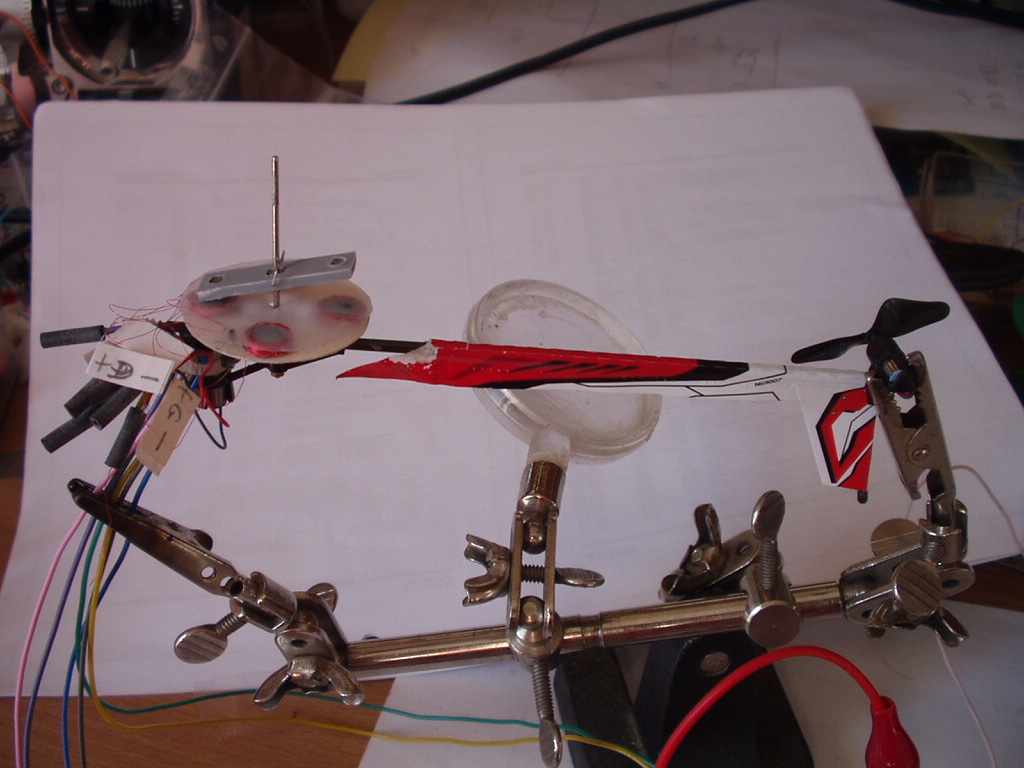
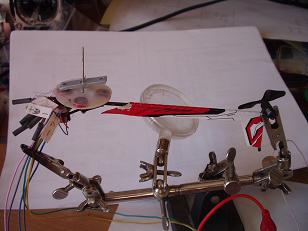
La mise en place du levier proto "light" avec liaison au rotor,
c'est du fil de kevlar qui assure la transmission du mouvement.




Et le look global de la bête style momie toute montée au ruban adhésif de
masquage. Le fuselage est taillé dans du polystyrène expansé. C'est moche, mais
qu'est-ce que ça encaisse bien les coups...
Masse en ordre de vol : 10g sur ma balance qui affiche le
gramme. Je n'ai hélas pas pesé le modèle d'origine sur la même.

Il faut tatonner pour trouver la bonne hauteur du levier. Trop
loin des bobines, l'effet sur le rotor est insuffisant et avec un levier à 90°
des pales principales, il me fallait un mixage 100% de nick vers roll et
l'inverse.
Trop près ça frotte.
Entre les deux, on voit bien que ce n'est plus un pilotage franchement 2 axes,
l'effet cyclique est sensible mais pas spectaculaire et les mixages ont pu être
supprimés. Quand je vous dis qu'il y a de la mise au point.
DERNIERES NOUVELLES 01/05/07 :
Le léger embonpoint provoqué par le combo, les bobines, le levier et le ruban
adhésif font que la puissance est juste suffisante en début de batterie. Au bout
de 2 minutes d'essais, la machine descend irrémédiablement et finie la mise au
point.
Avec la prise de programmation, c'est bien pire : la machine ne tient en l'air
que 5 à 10s puis descend irrémédiablement. Pas le temps de tester quoi que ce
soit.

Il est aussi probable que le courant consommé par le plateau mette la batterie à
genoux surtout avec les 2 manches dans les coins...
Quand j'entends que le Picoo peut embarquer 3g, j'ai des doutes sérieux.
J'ai testé une version logicielle qui alimente le moteur à 100%
gaz à fond ce qui n'était pas le cas dans la précédente puisqu'il y avait une
perte de l'ordre de 0.6%. Le nouveau soft est en ligne dans la rubrique
électronique. L'effet n'a pas été flagrant sur le vol.
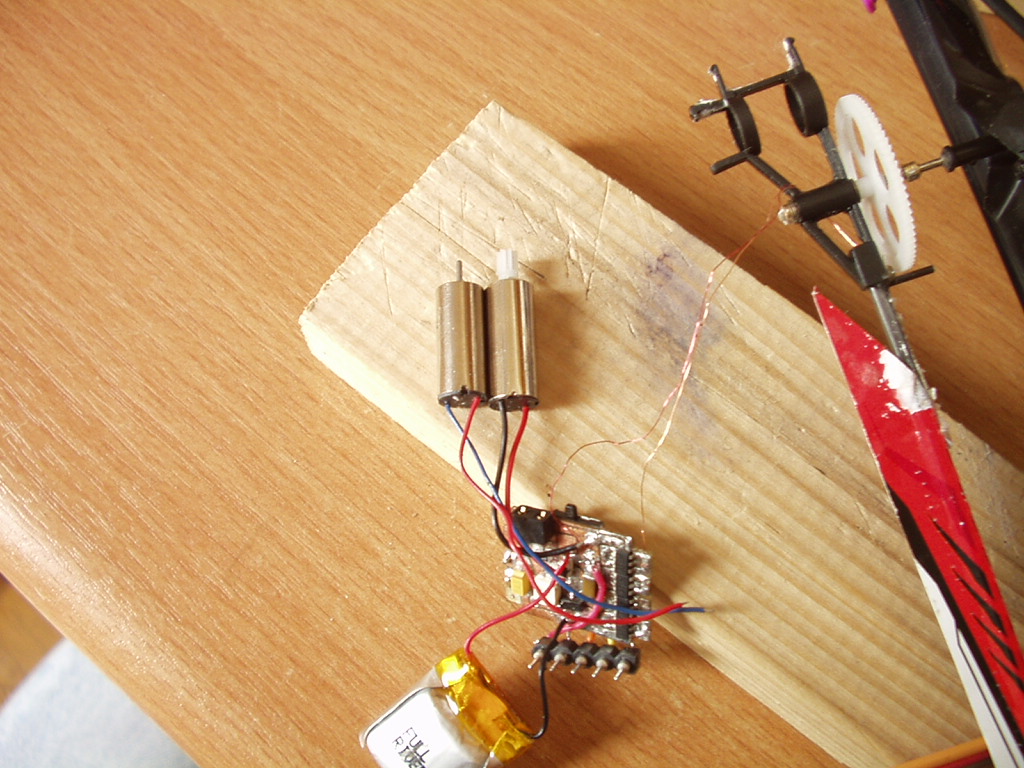
J'ai testé le moteur de Didel réf MK6L-10 dont les dimensions
sont très voisines du moteur d'origine du PicooZ. Le Didel est à peine plus
long.
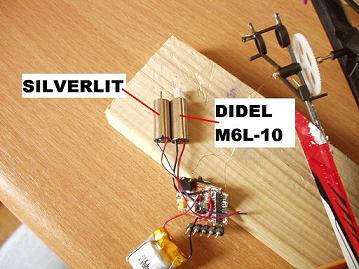
Grosse déception, l'appareil ne décolle même pas. Une petite
mesure au compte tours montre 2750 tr/min avec l'origine contre 2250 avec le
Didel. Forcément, ça va pas le faire.
Je ne pense pas que le MK6L-10 soit du mauvais matériel, mais dans le cas du
Picoo, il tourne à l'envers. Je n'y connais rien en moteur coreless, mais vu
qu'il y a des balais, le problème du calage se pose comme sur un speed 400 : à
l'envers, ça a moins de pêche car l'instant des commutations n'est pas optimisé.
Pas de version 2S pour l'instant, ça me fait revoir sérieusement
la conception du combo et il fait trop beau dehors. De plus, je ne crois pas que
le projet soit viable.
Pourquoi ça ne fonctionne pas :
C'est une vision perso et elle n'engage que moi :
La raison de voler du Picoo est sa stabilité bluffante. Oh, il a trouvé ça tout
seul ? Voui mais voilà la suite :
Ce génial appareil se passe de gyro et ça nous arrange bien pour la masse
justement à cause de sa stabilité.
Toute perturbation est sévèrement châtiée par le système autostable du rotor
auquel je n'ai toujours rien compris mais des gens compétents y ont travaillé
efficacement.
En installant un contrôle du cyclique (!), je casse la raison d'être du système
: la moindre perturbation au cyclique a un effet sur le lacet, sur la puissance
du moteur car les bobines consomment du courant. Moralité : je passe mon temps à
me battre avec l'anti-couple. Même si les essais sont très courts du fait du
manque de puissance, la sensation est nette.
En clair, ça va dans tous les sens car la machine est peu réactive et la
correction en lacet prend un certain temps. Et l'ordre que l'on venait de passer
au cyclique latéral se retrouve converti en cyclique longitudinal, non pas parce
que le pilote est mauvais mais parce que la machine réagit trop lentement.
En enlevant les masselottes du rotor stabilisateur, ça se retourne la crêpe
instantanément. Des masselottes de masse intermédiaire ne résoudraient pas le
problème de l'anticouple.
Bref, pour moi, ça ne fonctionne pas et ça en fonctionnera pas. Il faut attendre
des micro micro gyros sinon le projet est mort né.
Les quelques uns qui auraient pris leur fer à souder ne doivent
pas se pendre pour autant. Le combo sera utilisable tel quel sur un avion 2
axes.
L'hiver prochain si tout va bien, je publierai une page sur un
combo 4 voies dont 1 variateur et 3 sorties actuateurs à inversion du sens pour
équiper un avion 3 axes.
N'hésitez pas à me faire part de vos observations qui confirment
ou démentent ma conclusion.
Au passage grand merci à
Marcellus et
RC PILOT INTERNATIONAL, ma revue
préférée, qui ont fait un coup de pub sympa à cette page.